1. Название работы
Сервопривод и двухосевой джойстик
2. Цель работы
Целью работы является приобретение практических навыков управления сервоприводами и получения опыта регистрации манипуляций с двухосевом джойстиком.
3. Задачи работы
- Ознакомиться с методами получения реакции с двухосевого джойстика KY-023.
- Ознакомиться со способами управления сервоприводами CG90.
- Создать алгоритм работы программ в соответствии с заданиями пункта 6.
- Написать код программ по заданному алгоритму в пункте 3.
4. Состав лабораторного комплекта
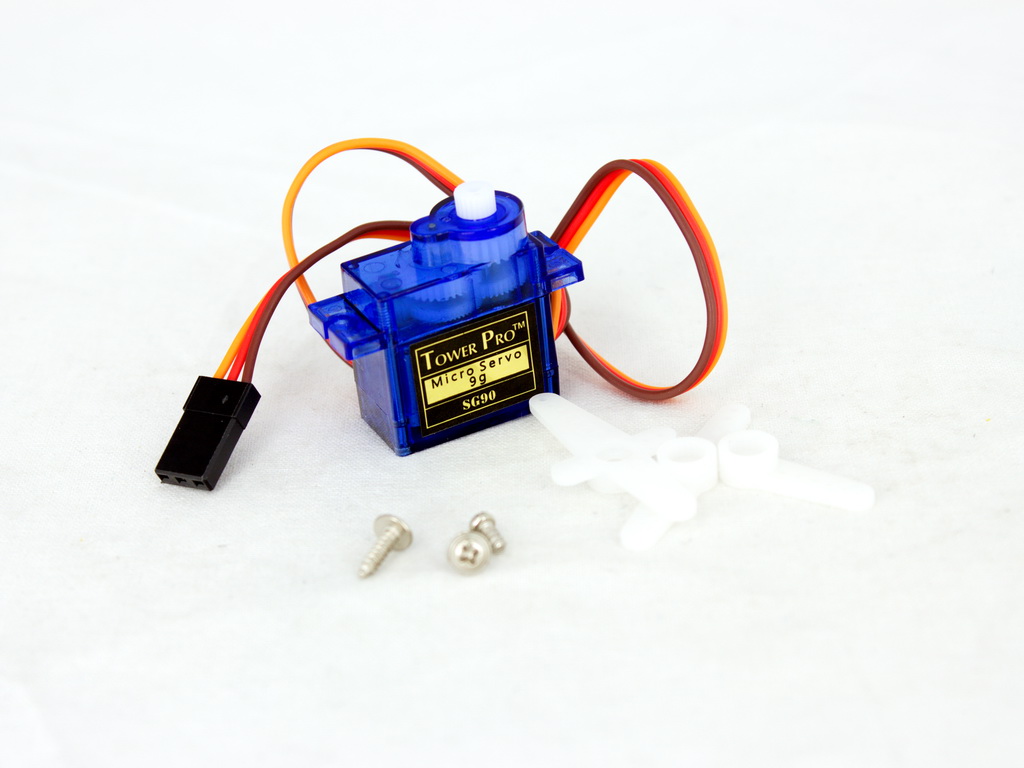 |  |  |
| SG90 (2 штуки) | KY-023 | Arduino Uno |
!!! Внимание !!!
При использовании аналога Arduino Wavgat предварительно следует установить на компьютер соответствующий драйвер.
Ссылка 1. Ссылка 2
и драйвер USB порта для CH341
Ссылка
Схема подключения
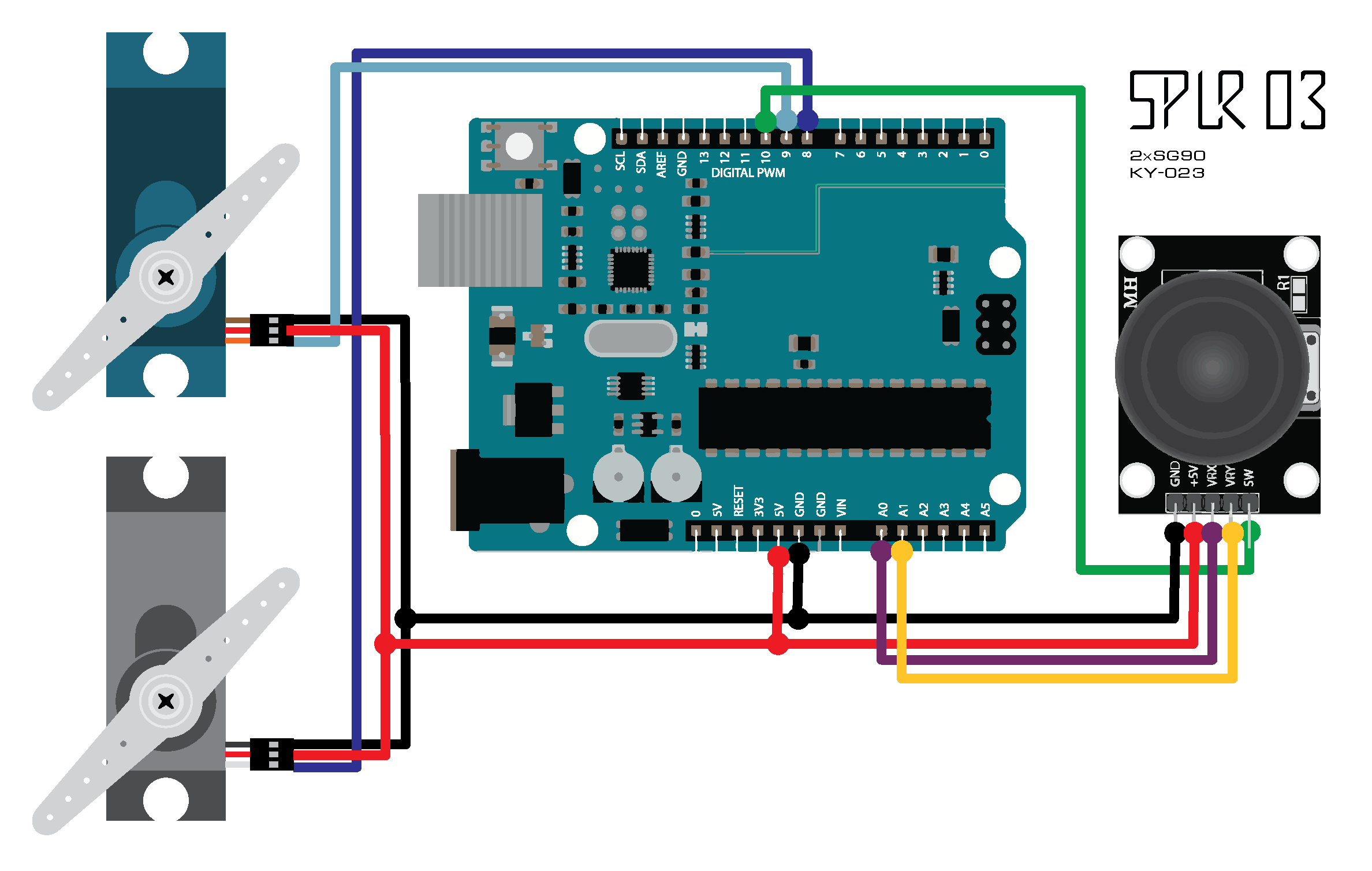
| SG90 1 | SG90 2 | KY-023 |
| Gnd (коричневый) -> Gnd +5V (красный) -> +5V Signal (рыжий) -> Arduino D9 | Gnd (черный) -> Gnd +5V (красный) -> +5V Signal (белый) -> Arduino D8 | Gnd -> Gnd +5V -> +5V VRx -> Arduino A0 VRy -> Arduino A1 SW -> Arduino D10 |
5. Исходные данные и материалы
Статья, посвященная работе с SG90
Статья, посвященная работе с KY-023
6. Задания к лабораторным работам
Задание 3.1
Вывести в Serial monitor величину отклонения KY-023 по координате X Вывести в Serial monitor величину отклонения KY-023 по координате Y
Вывести в Serial monitor реакцию на нажатие на KY-023
Задание 3.2
Установить SG90/1 в произвольный угол и вернуть его в исходное положение
Установить SG90/2 в произвольный угол и вернуть его в исходное положение
Задание 3.3
Реализовать изменение угла поворота SG90/1 пропорционально отклонению KY-023 по оси X. При небольшом отклонении KY-023 по оси X в одну сторону угол должен медленно увеличиваться. При большем отклонении KY-023 по оси X в одну сторону угол должен увеличиваться быстрее. При отклонении KY-023 по оси X в обратную сторону – угол должен уменьшаться на величину, пропорциональную отклонению KY-023.
Реализовать подобным образом поворот SG90/2 в соответствие с отклонением KY-023 по оси Y
Задание 3.4
К пункту 3.3 добавить установку обоих SG90 в нулевое положение при нажатии на KY-023
7. Полученные результаты
Результатом выполнения каждого задания является:
- Блок-схема алгоритма работы программы в графическом редакторе (yEd).
- Код программы и результаты ее тестирования на лабораторном комплекте в среде разработки Arduino IDE.
- Отчет по лабораторной работе.
8. Форма и условия сдачи/приема работы.
Каждый этап принимается отдельно.
Задания выполняются последовательно, к выполнению следующего задания ученики приступают только после сдачи предыдущего.
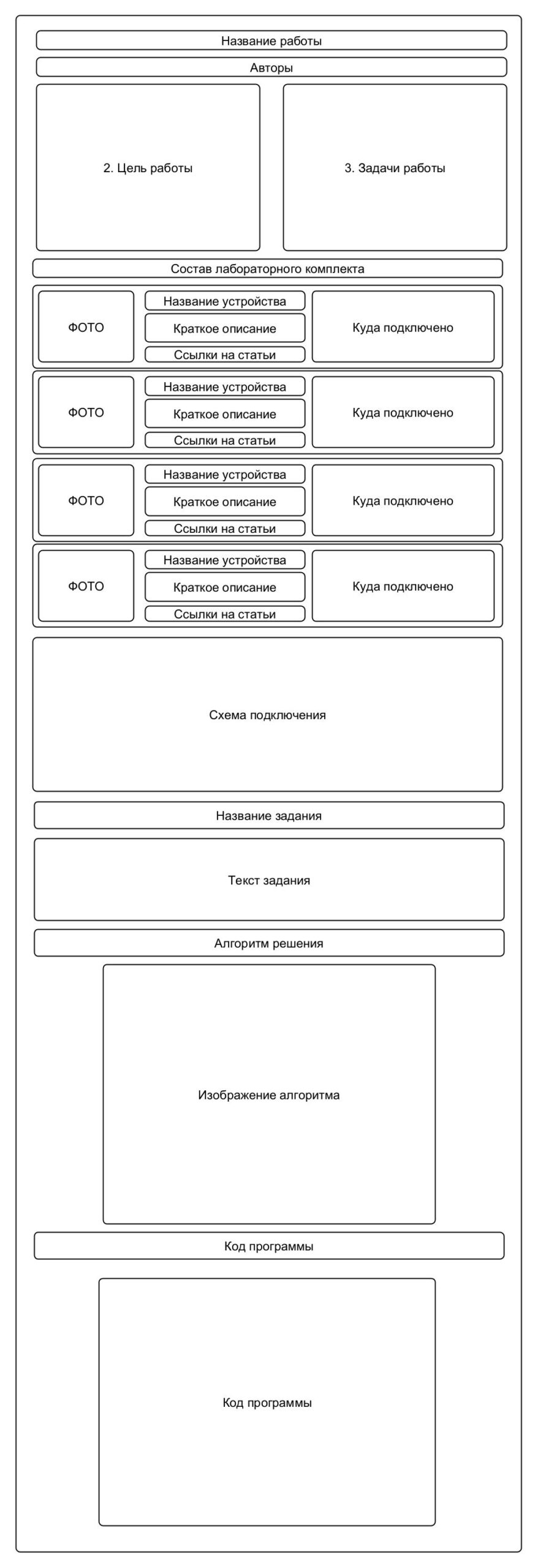
Для сдачи каждого задания создается отчет по лабораторной работе в виде HTML-документа, сверстанный с помощью HTML и CSS по следующему макету:
Каждое задание оформляется отдельным документом. Все HTML-отчеты с графическими файлами объединяются в архив и передаются преподавателю указанным способом.