
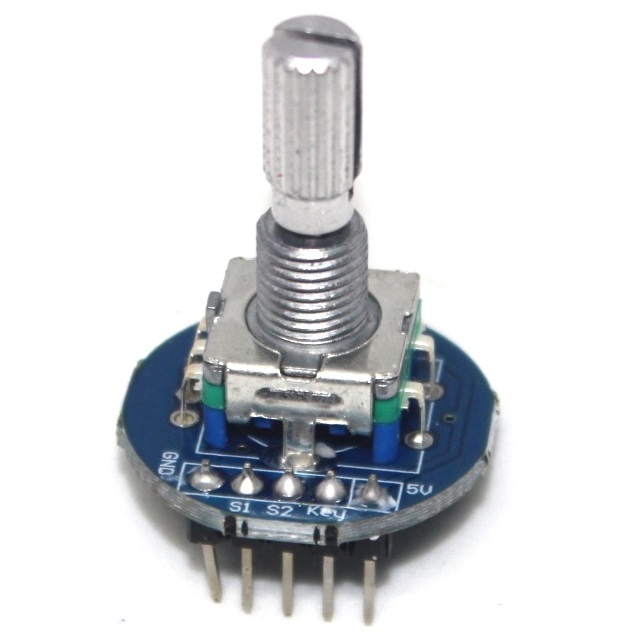
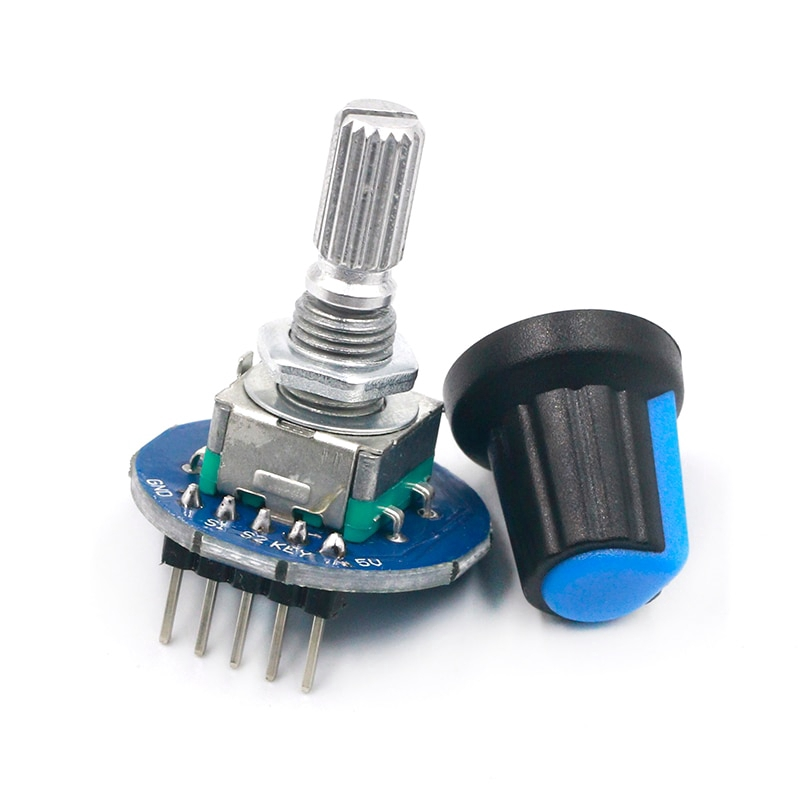

Инкрементальный энкодер EC-11
Краткое описание
Инкрементальный (или инкрементный, от англ. increment — «увеличение») энкодер (датчик угла поворота) — это устройство, которое преобразовывает вращательное движение вала в серию электрических импульсов, позволяющих определить направление и угол его вращения. Также, исходя из найденных величин, можно определить и скорость вращения.
Инкрементальные энкодеры бывают оптическими, магнитными, механическими и т.д. Вне зависимости от принципа устройства все инкрементальные энкодеры на выходе генерируют 2 линии (A и B) с импульсами смещенными относительно друг друга. Именно по смещению импульсов можно судить о направлении вращения. А по количеству импульсов — об угле поворота.
Подключение EC-11
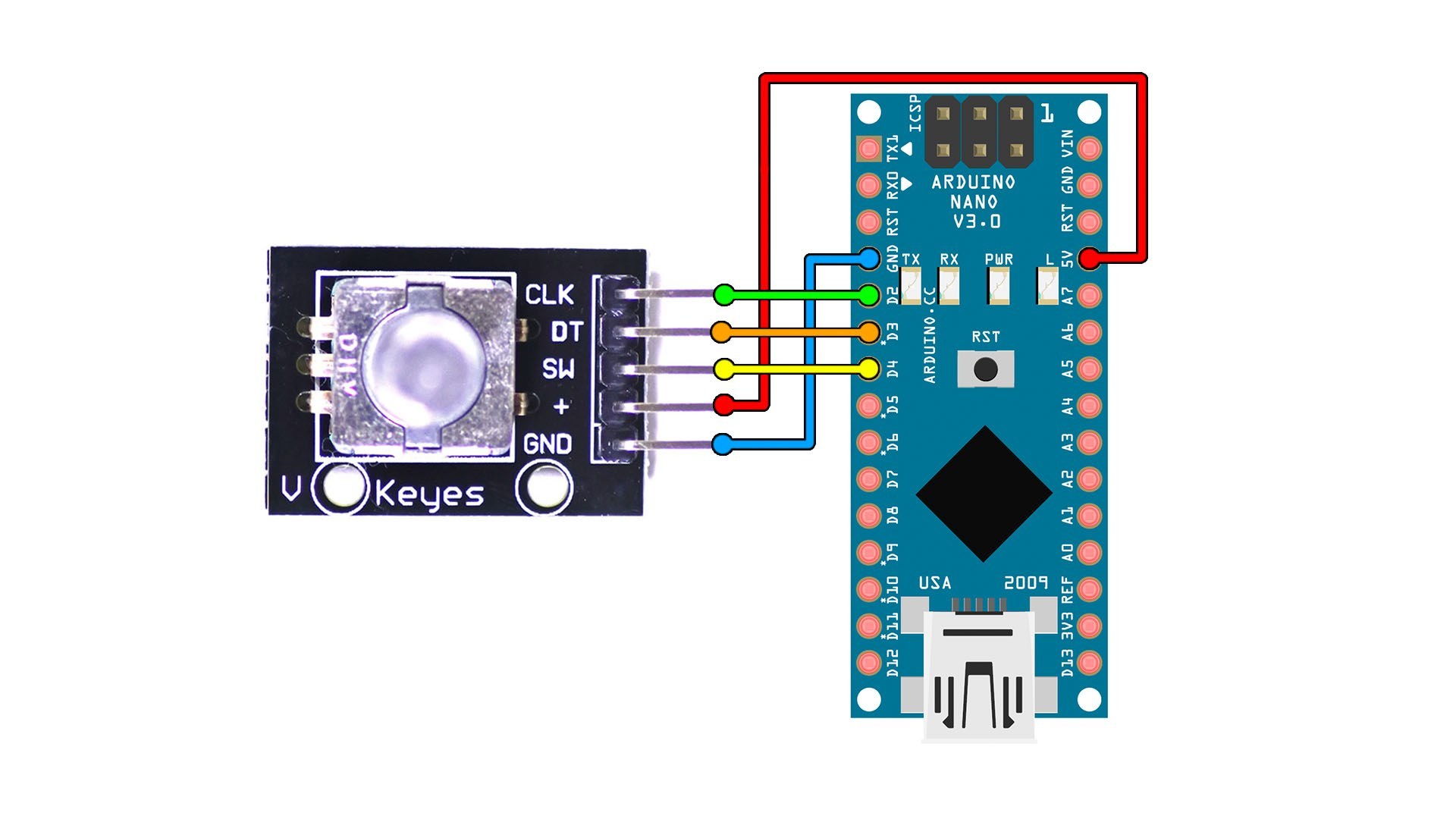
- Gnd -> Gnd
- S1 -> Arduino D8
- S2 -> Arduino D9
- Key -> Arduino D10
- +5V -> +5V
Сcылки на сайт с библиотекой и источником информацией
Схема подключения и код подключения модуля к Arduino
// Rotary Encoder Inputs
#define S1 8
#define S2 9
#define Key 10
int counter = 0;
int currentStateS1;
int lastStateS1;
String currentDir ="";
unsigned long lastButtonPress = 0;
void setup() {
// Set encoder pins as inputs
pinMode(S1,INPUT);
pinMode(S2,INPUT);
pinMode(Key, INPUT_PULLUP);
// Setup Serial Monitor
Serial.begin(9600);
// Read the initial state of S1
lastStateS1 = digitalRead(S1);
}
void loop() {
// Read the current state of S1
currentStateS1 = digitalRead(S1);
// If last and current state of S1 are different, then pulse occurred
// React to only 1 state change to avoid double count
if (currentStateS1 != lastStateS1 && currentStateS1 == 1){
// If the S2 state is different than the S1 state then
// the encoder is rotating CCW so decrement
if (digitalRead(S2) != currentStateS1) {
counter --;
currentDir ="CCW";
} else {
// Encoder is rotating CW so increment
counter ++;
currentDir ="CW";
}
Serial.print("Direction: ");
Serial.print(currentDir);
Serial.print(" | Counter: ");
Serial.println(counter);
}
// Remember last S1 state
lastStateS1 = currentStateS1;
// Read the button state
int btnState = digitalRead(Key);
//If we detect LOW signal, button is pressed
if (btnState == LOW) {
//if 50ms have passed since last LOW pulse, it means that the
//button has been pressed, released and pressed again
if (millis() - lastButtonPress > 50) {
Serial.println("Button pressed!");
}
// Remember last button press event
lastButtonPress = millis();
}
// Put in a slight delay to help debounce the reading
delay(1);
© Вёрстку делал Даниэль Усов